Le moteur asynchrone triphasé est le moteur le plus utilisé. Il est plus robuste et moins cher que le moteur à courant continu .
On peut faire varier sa vitesse de rotation grâce à un onduleur.
Description :
Son stator correspond à l'inducteur de la machine. Alimenté par un réseau triphasé de tensions, il engendre un champ tournant à l'intérieur de la machine. Le champ tourne à la fréquence de rotation ns. Ce champ tournant entraîne la rotation du rotor à la fréquence de rotation n.
![]()
Où f est la fréquence des tensions alimentant le moteur et p le nombre de paires de pôles de ce moteur.
Le rotor peut être soit à cage d'écureuil, soit bobiné.
où W S est la vitesse angulaire de synchronisme (rad/s) , W est la vitesse angulaire de rotation du moteur (rad/s). nS et n sont les fréquences de rotation ( tr/s ou tr/min).
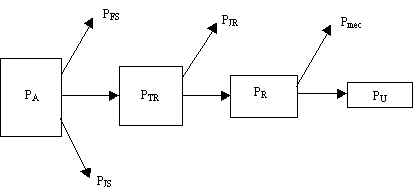
Bilan des puissances mises en jeu dans le moteur asynchrone :
Puissance reçue :
Puissance transmise au rotor :
où PFS et PJS sont respectivement les pertes dans le fer et les pertes Joule au stator.
Puissance transmise à l'arbre du rotor :
Pertes Joules au rotor :
donc
Puissance utile :
où Pmec sont des pertes mécaniques dues aux frottements
Bilan des puissances
![]()
Caractéristique mécanique Tu =f(W)
Le point de fonctionnement est à l'intersection de la courbe Tu(W) et de la courbe Tr(W).
Dans sa partie utile ( pour des vitesses proches de WS ) on considère que Tu=k.g
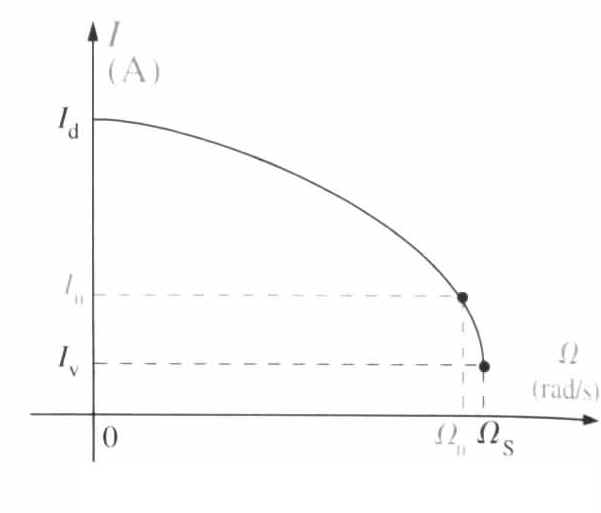
Caractéristique électromécanique I =f(W)
On peut remarquer que le courant est plusieurs fois plus important au démarrage qu'au fonctionnement nominale.